
Схема подключения бортового компьютера Slope 2v
Обновлено: 18.05.2024
Узнайте о вариантах использования, целях и истории бортовой диагностики и OBDII.
Возможно, вы встречали термины «OBD» или «OBDII», когда читали об подключенных транспортных средствах и устройстве Geotab GO. Эти функции являются частью бортовых компьютеров автомобиля и имеют историю, о которой мало кто знает. Прочтите этот пост для обзора OBDII и графика его разработки.
См. также:
Что такое OBD (бортовая диагностика)?
Под бортовой диагностикой (OBD) понимается автомобильная электронная система, которая обеспечивает самодиагностику автомобиля и возможности составления отчетов для специалистов по ремонту. OBD дает техническим специалистам доступ к информации о подсистеме для мониторинга производительности и анализа потребностей в ремонте.
OBD — это стандартный протокол, используемый в большинстве легковых автомобилей для получения диагностической информации. Информация генерируется блоками управления двигателем (ECU или модулями управления двигателем) внутри автомобиля. Они похожи на мозг автомобиля или компьютеры.
Почему OBD так важен?
OBD — важная часть телематики и управления автопарком, позволяющая измерять и управлять состоянием транспортных средств и вождением.
Благодаря OBD автопарки могут:
- отслеживать тенденции износа и узнавать, какие детали автомобиля изнашиваются быстрее других
- мгновенно диагностировать проблемы с транспортным средством до их возникновения, поддерживая упреждающее, а не реактивное управление
- измерять манеру вождения, скорость, время простоя и многое другое
Где находится порт OBDII?
В обычном легковом автомобиле разъем OBDII находится на нижней стороне приборной панели со стороны водителя. В зависимости от типа транспортного средства порт может иметь 16-контактную, 6-контактную или 9-контактную конфигурацию.

Если вы хотите подключить устройство Geotab GO к бортовому диагностическому порту, вы можете начать с прочтения Как установить устройство слежения за транспортными средствами Geotab GO.
В чем разница между OBD и OBDII?
Проще говоря, OBDII — это второе поколение OBD или OBD I. Первоначально OBD I был внешне подключен к консоли автомобиля, а теперь OBDII интегрирован в сам автомобиль. Оригинальный OBD использовался до тех пор, пока в начале 1990-х годов не был изобретен OBDII.
История OBDII
История бортовой диагностики восходит к 1960-м годам. Основу стандарта заложили несколько организаций, в том числе Калифорнийский совет по воздушным ресурсам (CARB), Общество автомобильных инженеров (SAE), Международная организация по стандартизации (ISO) и Агентство по охране окружающей среды (EPA).
Важно отметить, что до стандартизации производители создавали собственные системы. Инструменты каждого производителя (а иногда и модели одного производителя) имели свой тип разъема, требования к электронному интерфейсу. Они также использовали свои собственные коды для сообщений о проблемах.
Основные моменты в истории OBD:
1968 — Volkswagen представил первую компьютерную систему OBD с возможностью сканирования.
1978 — Datsun представила простую систему OBD с ограниченными нестандартными возможностями.
1979 г. — Общество автомобильных инженеров (SAE) рекомендует стандартизированный диагностический разъем и набор диагностических тестовых сигналов.
1980 — GM представила собственный интерфейс и протокол, позволяющие проводить диагностику двигателя через интерфейс RS-232 или, проще говоря, путем мигания индикатора Check Engine.
1988 г. Стандартизация бортовой диагностики началась в конце 1980-х годов после рекомендации SAE 1988 г., которая требовала стандартного разъема и набора диагностических средств.
1991 г. — штат Калифорния требует, чтобы все автомобили имели базовую бортовую диагностику в той или иной форме. Это называется OBD I.
1994 — Штат Калифорния обязал все автомобили, продаваемые в штате, начиная с 1996 года, иметь бортовую систему диагностики (OBD) в соответствии с рекомендациями SAE (теперь это называется OBDII). Это связано с желанием провести всесторонние испытания на выбросы. OBDII включает серию стандартизированных диагностических кодов неисправностей (DTC).
1996 — OBD-II становится обязательным для всех автомобилей, произведенных в США.
2001 — EOBD (европейская версия OBD) становится обязательной для всех автомобилей с бензиновым двигателем в Европейском союзе (ЕС).
2003 — EOBD становится обязательным для всех дизельных автомобилей в ЕС.
2008 — Начиная с 2008 года все автомобили в США должны использовать OBDII через сеть контроллеров, как указано в стандарте ISO 15765-4.
К каким данным можно получить доступ через OBDII?
OBDII обеспечивает доступ к информации о состоянии и диагностическим кодам неисправностей (DTC) для:
- Привод (двигатель и трансмиссия)
- Системы контроля выбросов
Кроме того, вы можете получить доступ к следующей информации об автомобиле через OBD II:
Когда автомобиль доставляется в сервисный центр, механик может подключиться к порту OBD с помощью сканирующего устройства, прочитать коды неисправностей и определить проблему. Это означает, что механики могут точно диагностировать неисправности, быстро осматривать автомобиль и устранять неисправности до того, как они станут серьезной проблемой.
Примеры
Режим 1 (информация о транспортном средстве):
- Pid 12 — число оборотов двигателя
- Pid 13 – скорость автомобиля.
Режим 3 (коды неисправностей: P = трансмиссия, C = шасси, B = кузов, U = сеть):
- P0201 — Неисправность цепи форсунки — Цилиндр 1
- P0217 — Перегрев двигателя
- P0219 — Состояние превышения скорости двигателя.
- C0128 — Низкий уровень тормозной жидкости в цепи
- C0710 — Неисправность положения руля.
- B1671 — Напряжение модуля батареи вне допустимого диапазона
- U2021 — Получены неверные/неверные данные
Чтобы обнаружить еще больше кодов, вы можете обратиться к этому списку стандартных диагностических кодов неисправностей.
OBD и телематика
Наличие OBDII позволяет телематическим устройствам молча обрабатывать такую информацию, как обороты двигателя, скорость автомобиля, коды неисправностей, расход топлива и многое другое. Затем телематическое устройство может использовать эту информацию для определения начала и окончания поездки, превышения оборотов, превышения скорости, чрезмерного холостого хода, расхода топлива и т. д. Вся эта информация загружается в программный интерфейс и позволяет руководителям автопарков отслеживать использование и производительность транспортных средств.
Из-за множества протоколов OBD не все телематические решения предназначены для работы со всеми типами транспортных средств, которые существуют сегодня. Телематика Geotab решает эту проблему, переводя диагностические коды автомобилей разных марок и моделей и даже электромобилей.
Благодаря порту OBD-II решение для отслеживания автопарка можно быстро и легко подключить к вашему автомобилю. В случае с Geotab его можно настроить менее чем за пять минут.
Если в вашем автомобиле или грузовике нет стандартного порта OBDII, вместо него можно использовать адаптер. В любом случае процесс установки выполняется быстро и не требует специальных инструментов или помощи профессионального установщика.
Что такое WWH-OBD?
WWH-OBD расшифровывается как бортовая диагностика, согласованная во всем мире. Это международный стандарт, используемый для диагностики транспортных средств, введенный Организацией Объединенных Наций в рамках мандата Глобальных технических правил (GTR), который включает мониторинг данных транспортных средств, таких как выбросы и коды неисправностей двигателя.
Преимущества WWH-OBD
Вот преимущества перехода на WWH с более технической точки зрения:
Доступ к большему количеству типов данных
В настоящее время идентификаторы OBDII PID, используемые в режиме 1, имеют длину всего один байт, а это означает, что доступно только до 255 уникальных типов данных. Расширение PID также может быть применено к другим режимам OBD-II, которые были перенесены в WWH через режимы UDS. Адаптация стандартов WWH позволит получить больше доступных данных и даст возможность расширения в будущем.
Более подробные данные об ошибках
Еще одним преимуществом WWH является расширение информации, содержащейся в неисправности. В настоящее время OBDII использует двухбайтовый диагностический код неисправности (DTC), чтобы указать, когда произошла ошибка (например, P0070 указывает, что датчик температуры окружающего воздуха «A» имеет общий электрический отказ).
Унифицированные службы диагностики (UDS) преобразуют 2-байтовый DTC в 3-байтовый DTC, в котором третий байт указывает на «режим» отказа. Этот режим отказа аналогичен индикатору режима отказа (FMI), используемому в протоколе J1939. Например, ранее на OBDII у вас могли быть следующие пять ошибок:
- P0070 Цепь датчика температуры окружающего воздуха
- P0071 Диапазон/функционирование датчика температуры окружающего воздуха
- P0072 Низкий входной сигнал цепи датчика температуры окружающего воздуха
- P0073 Высокий входной сигнал цепи датчика температуры окружающего воздуха
- P0074 Прерывистый сигнал в цепи датчика температуры окружающего воздуха
При использовании WWH все они объединены в один код P0070 с 5 различными режимами отказа, указанными в третьем байте кода неисправности. Например, P0071 теперь становится P0070-1C.
WWH также предоставляет дополнительную информацию об ошибке, такую как серьезность/класс и статус. Серьезность указывает, как скоро вам нужно проверить неисправность, а класс неисправности указывает, к какой группе относится неисправность в соответствии со спецификациями GTR. Кроме того, в статусе неисправности будет указано, находится ли она на рассмотрении, подтверждена или проверка этой неисправности завершена в текущем ездовом цикле.
Подводя итог, WWH-OBD расширяет текущую структуру OBD II, чтобы предоставить пользователю еще больше диагностической информации.
Geotab поддерживает WWH-OBD
Geotab уже внедрил протокол WWH в нашу прошивку. Geotab использует сложную систему обнаружения протокола, в которой мы безопасно проверяем, что доступно на транспортном средстве, чтобы выяснить, доступен ли OBD-II или WWH (в некоторых случаях доступны оба).
В Geotab мы постоянно совершенствуем нашу прошивку, чтобы еще больше повысить качество информации, которую получают наши клиенты. Мы уже начали поддерживать 3-байтовую информацию о кодах неисправности и продолжаем добавлять дополнительную информацию о неисправностях, возникающих в автомобилях. Когда новая информация становится доступной через OBDII или WWH (например, новый PID или данные о неисправности), или если на транспортном средстве реализован новый протокол, Geotab делает приоритетным быстрое и точное добавление ее в прошивку. Затем мы немедленно отправляем новую прошивку на наши устройства через облако, чтобы наши клиенты всегда получали максимальную выгоду от своих устройств.
Выход за рамки OBDII
OBDII содержит 10 стандартных режимов для получения необходимой диагностической информации для стандартов выбросов. Проблема в том, что этих 10 режимов оказалось недостаточно.
За прошедшие годы после внедрения OBDII были разработаны различные режимы UDS для обогащения имеющихся данных. Каждый производитель транспортных средств использует свои собственные PID (идентификаторы параметров) и реализует их через дополнительные режимы UDS. Информация, которая не требовалась через данные OBDII (например, одометр и использование ремней безопасности), вместо этого стала доступна через режимы UDS.
Реальность такова, что UDS содержит более 20 дополнительных режимов к текущим 10 стандартным режимам, доступным через OBDII, а это означает, что UDS имеет больше доступной информации. Но именно здесь на помощь приходит WWH-OBD. Он пытается объединить режимы UDS с OBDII, чтобы обогатить данные, доступные для диагностики, сохраняя при этом стандартизированный процесс.
Заключение
В расширяющемся мире Интернета вещей порт OBD по-прежнему важен для здоровья, безопасности и экологичности автомобиля. Хотя количество и разнообразие подключенных устройств для транспортных средств увеличивается, не все устройства сообщают и отслеживают одну и ту же информацию. Кроме того, совместимость и безопасность могут различаться в зависимости от устройства.
Из-за множества протоколов OBD не все телематические решения предназначены для работы со всеми типами транспортных средств, которые существуют сегодня. Хорошие телематические решения должны понимать и переводить полный набор диагностических кодов транспортных средств.
Чтобы узнать, как выбрать GPS-устройство слежения за транспортными средствами, прочитайте: Не все подключаемые устройства OBD для управления автопарком одинаковы.
Кроме того, чрезвычайно важна проверка безопасности сторонних устройств, подключенных к порту OBDII. Чтобы узнать больше о передовых методах кибербезопасности в телематике для отслеживания автопарка, прочитайте эти 15 рекомендаций по безопасности.
В этом руководстве вы узнаете все о коммуникационном протоколе I 2 C, о том, зачем его использовать и как он реализован.
Протокол Inter-Integrated Circuit (I 2 C) – это протокол, предназначенный для обеспечения связи нескольких "периферийных" цифровых интегральных схем ("микросхем") с одной или несколькими "контроллерными" микросхемами. Как и последовательный периферийный интерфейс (SPI), он предназначен только для связи на короткие расстояния в пределах одного устройства. Подобно асинхронным последовательным интерфейсам (например, RS-232 или UART), для обмена информацией требуется всего два сигнальных провода.
Рекомендуемое чтение
Вещи, которые было бы полезно знать перед чтением этого руководства:
Последовательная связь
Последовательный периферийный интерфейс (SPI)
SPI обычно используется для подключения микроконтроллеров к периферийным устройствам, таким как датчики, сдвиговые регистры и SD-карты.
Двоичный
Двоичная система счисления в электронике и программировании. так что, должно быть, важно учиться. Но что такое двоичный код? Как это переводится в другие системы счисления, такие как десятичная?
Сдвиговые регистры
Логические уровни
Зачем использовать I2C?
Чтобы выяснить, почему кому-то может понадобиться общаться через I 2 C, вы должны сначала сравнить его с другими доступными вариантами, чтобы увидеть, чем они отличаются.
Что не так с последовательными портами UART?

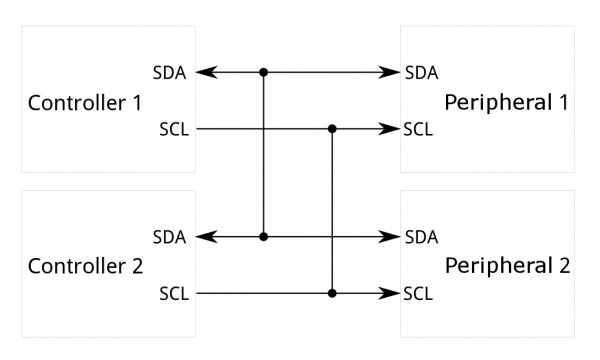
I 2 C требует всего два провода, как асинхронный последовательный порт, но эти два провода могут поддерживать до 1008 периферийных устройств. Кроме того, в отличие от SPI, I 2 C может поддерживать систему с несколькими контроллерами, что позволяет более чем одному контроллеру [1] связываться со всеми периферийными [1] устройствами на шине (хотя устройства контроллера не могут общаться друг с другом по шине). автобус и должны по очереди пользоваться автобусными линиями).
Скорость передачи данных находится между асинхронным последовательным портом и SPI; большинство устройств I 2 C могут обмениваться данными на частоте 100 кГц или 400 кГц. Есть некоторые накладные расходы с I 2 C; на каждые 8 бит отправляемых данных должен передаваться один дополнительный бит метаданных (бит «ACK/NACK», который мы обсудим позже).
Аппаратное обеспечение, необходимое для реализации I 2 C, более сложное, чем SPI, но менее сложное, чем асинхронное последовательное соединение. Это может быть довольно просто реализовано в программном обеспечении.
[1] Примечание. Возможно, вы знакомы с терминами «ведущее устройство» и «ведомое устройство», которые обозначают отношения между устройствами на шине I 2 C. Эти термины считаются устаревшими и теперь заменены терминами "контроллер" и "периферийное устройство" соответственно.
| Устаревшее имя | Имя замены |
|---|---|
| Мастер td> | Контроллер |
| Подчиненный | Периферийный |
Краткая история I2C
I 2 C был первоначально разработан в 1982 году компанией Philips для различных чипов Philips. Первоначальная спецификация допускала связь только на частоте 100 кГц и предусматривала только 7-битные адреса, ограничивая количество устройств на шине до 112 (существует несколько зарезервированных адресов, которые никогда не будут использоваться для действительных адресов I 2 C). В 1992 году была опубликована первая общедоступная спецификация, в которой был добавлен быстрый режим 400 кГц, а также расширенное 10-битное адресное пространство. В большинстве случаев (например, в устройстве ATMega328 на многих платах, совместимых с Arduino) поддержка устройства I 2 C заканчивается на этом этапе. Указаны три дополнительных режима:
- быстрый режим плюс, 1 МГц
- высокоскоростной режим на частоте 3,4 МГц
- сверхбыстрый режим, 5 МГц
В дополнение к «ванильному» I 2 C в 1995 году Intel представила вариант под названием «Шина управления системой» (SMBus). SMBus — это более строго контролируемый формат, предназначенный для обеспечения максимальной предсказуемости связи между поддерживающими ИС на материнских платах ПК. Наиболее существенная разница между SMBus заключается в том, что он ограничивает скорости от 10 кГц до 100 кГц, тогда как I 2 C может поддерживать устройства от 0 кГц до 5 МГц. SMBus включает режим тайм-аута часов, который делает низкоскоростные операции незаконными, хотя многие устройства SMBus все равно поддерживают его, чтобы максимизировать взаимодействие со встроенными системами I 2 C.
I2C на аппаратном уровне
Сигналы
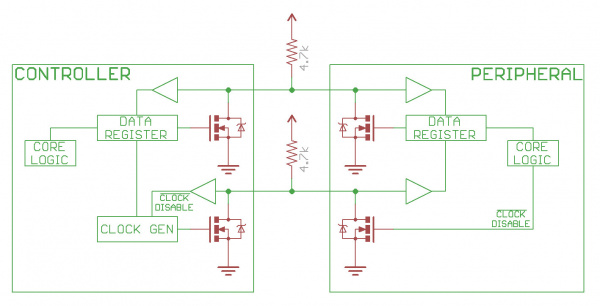
Каждая шина I 2 C состоит из двух сигналов: SDA и SCL. SDA (Serial Data) — это сигнал данных, а SCL (Serial Clock) — это тактовый сигнал. Тактовый сигнал всегда генерируется текущим контроллером шины; некоторые периферийные устройства могут время от времени переводить часы на низкий уровень, чтобы задержать отправку контроллером дополнительных данных (или потребовать больше времени для подготовки данных, прежде чем контроллер попытается их синхронизировать). Это называется "растягиванием часов" и описано на странице протокола.
В отличие от подключений UART или SPI, драйверы шины I 2 C являются «открытыми стоками», что означает, что они могут тянуть соответствующую сигнальную линию с низким уровнем, но не могут повышать ее. Таким образом, не может быть конкуренции за шину, когда одно устройство пытается поднять линию на высокий уровень, а другое — на низкий, что устраняет возможность повреждения драйверов или чрезмерного рассеивания мощности в системе. На каждой сигнальной линии есть подтягивающий резистор, который восстанавливает высокий уровень сигнала, когда ни одно устройство не устанавливает низкий уровень сигнала.
Большинство устройств I 2 C, предлагаемых в каталоге SparkFun, обычно включают подтягивающие резисторы для выводов SCL и SDA. Если у вас есть много устройств I 2 C на одной шине, вам может потребоваться настроить эквивалентное значение для подтягивающих резисторов, отключив подтягивающие резисторы на нескольких устройствах. В зависимости от того, что подключено к шине и конструкции, на одну шину можно включить около 7 устройств I 2 C. Однако, если у вас возникли проблемы, вы можете отрезать две дорожки, соединяющие центральную контактную площадку, с помощью канцелярского ножа или удалить припой с трех контактных площадок с помощью паяльника, чтобы отсоединить резисторы на некоторых платах. Как видите, в конструкции платы GPS слева использовались дорожки для подключения перемычек для подтягивающих резисторов. В конструкции платы GPS справа для соединения перемычек подтягивающих резисторов использовался припой.
 |  |
| < i>Трассировка соединительных контактных колодок на SAM-M8Q | Пропайка соединительных контактных площадок на XA1110 |
Если ваша конструкция требует более длинных отрезков провода, вы можете использовать специальную микросхему для расширения сигнала, такую как PCA9615.
Если вы приобрели автомобиль после 1996 года, он, вероятно, имеет порт OBD-II. Но для чего он нужен и как с его помощью диагностировать ошибки?
Если вы приобрели автомобиль после 1996 года, скорее всего, он оснащен портом OBD-II (бортовая диагностика II). Каждый легковой или грузовой автомобиль, выпущенный после 1996 года, должен быть установлен по закону.
OBD-II – это бортовой компьютер, который отслеживает выбросы, пробег, скорость и другие данные о вашем автомобиле. Он подключен к индикатору Check Engine, который загорается, когда компьютер обнаруживает проблему.
Бортовой компьютер OBD-II оснащен 16-контактным портом, расположенным под панелью приборов со стороны водителя. Это позволяет механику или кому-либо другому считать код ошибки с помощью специального сканирующего устройства.
OBD-I и OBD-II
До OBD-I у каждого производителя был свой набор стандартов для OBD, а это означало, что механики должны были покупать дорогие сканирующие инструменты для каждого производителя. OBD-I был впервые представлен в 1987 году и положил начало стандартизации бортовой диагностики.
У него были датчики, которые обнаруживали выбросы и могли минимизировать их с помощью клапанов, контролирующих выбросы. Однако у него было много проблем и недостатков.
В результате в 1996 году производители автомобилей начали оснащать легковые и грузовые автомобили портом OBD-II. Все системы в основном одинаковы, но есть небольшие отличия. Они называются протоколами и используются производителями транспортных средств.
Существует пять основных сигнальных протоколов:
- SAE J1850 PWM: широтно-импульсная модуляция, используемая в автомобилях Ford
- SAE J1850 VPW: переменная ширина импульса, используемая в автомобилях General Motors.
- ISO9141-2: используется во всех автомобилях Chrysler и различных европейских и азиатских автомобилях.
- ISO14230-4 (KWP2000): протокол ключевых слов, используемый в различных импортных автомобилях из Европы и Азии, а также в автомобилях Honda, Jeep, Land Rover, Subaru, Mazda, Nissan и т. д.
- ISO 15765 CAN: сеть контроллеров, используемая на всех автомобилях, выпущенных после 2008 года.
Контакты 4 и 5 во всех протоколах используются для заземления, а контакт 16 используется для питания от автомобильного аккумулятора.
Как только компьютер обнаружит проблему с двигателем или любым другим компонентом автомобиля, за которым он следит, загорится индикатор Check Engine. Некоторые автомобили также мигают индикатором двигателя, если проблема очень серьезная.
Как работает OBD-II?
Диагностические коды неисправностей (DTC) хранятся в компьютерной системе. Коды могут варьироваться от одного производителя к другому. Однако любой, у кого есть сканер OBD-II, может подключиться к порту и считать диагностические коды неисправностей с компьютера.
Причина, по которой любой сканер OBD-II может считывать коды, заключается в стандартизированной распиновке. Инструменты сканирования могут считывать любой из протоколов, перечисленных выше. Стандартная распиновка выглядит следующим образом.
- Pin 1: используется производителем.
- Контакт 2: используется SAE J1850 PWM и VPW.
- Контакт 3: используется производителем.
- Контакт 4: заземление
- Контакт 5: заземление
- Контакт 6: используется ISO 15765-4 CAN.
- Вывод 7: линейка K в соответствии со стандартами ISO 9141-2 и ISO 14230-4.
- Контакт 10: используется только ШИМ SAE J1850.
- Контакт 14: используется в стандарте ISO 15765-4 CAN.
- Вывод 15: линейка K в соответствии со стандартами ISO 9141-2 и ISO 14230-4.
- Контакт 16: питание от автомобильного аккумулятора.
Сканеры OBD-II могут подключаться к этим портам и идентифицировать код неисправности любого производителя, использующего один из протоколов OBD-II.
Что можно подключить к порту OBD-II?
Традиционно механик подключал сканер к порту, чтобы считать код неисправности. Менее дорогие сканеры будут предоставлять только числовой код, который механик затем будет искать в руководстве производителя или на веб-сайте обслуживания. Более дорогие сканеры предоставляют текстовые коды ошибок.
Однако в последние годы появились более продвинутые инструменты, доступные для обычных водителей, которые не хотят зависеть от механика, чтобы выяснить, что не так с их автомобилем.
Одним из примеров является USB-адаптер OBDLink SX от ScanTool, который позволяет считывать коды неисправностей с помощью ноутбука.
Это устройство позволяет подключаться непосредственно к порту OBD-II, а другой конец — к USB-порту ноутбука с Windows.
Это превращает ваш компьютер в продвинутый сканер OBD, плюс вы даже можете сбросить индикатор Check Engine с помощью диагностического программного обеспечения OBDwiz.
Если вы предпочитаете беспроводное решение, ScanTool также предлагает OBDLink MX Bluetooth.
Это устройство позволяет вам считывать данные диагностики вашего автомобиля с помощью ноутбука с Windows, поддерживающего bluetooth, или устройства Android.
Он поставляется с бесплатным программным обеспечением для Windows и Android для удаленной диагностики вашего автомобиля.
Другие приложения для мобильных сканеров OBD-II
Компьютерная система вашего автомобиля постоянно отслеживает различные системы и компоненты автомобиля.
Это означает, что любое устройство, подключенное к порту, может считывать одну и ту же информацию и передавать ее на ваше мобильное устройство. Представьте, что вы открываете приложение на своем телефоне и видите текущий расход топлива вашего автомобиля, температуру, давление масла и многое другое.
Сегодня это возможно с любым из перечисленных ниже устройств и приложений.
Продукты BAFX — Wi-Fi OBD Reader (iOS)
Этот беспроводной считыватель OBD от BAFX Products превращает ваше устройство iOS во впечатляющий усовершенствованный инструмент OBD. Вы можете не только считывать все диагностические данные с вашего автомобиля, но и отслеживать данные в режиме реального времени, такие как:
- Температура двигателя
- Расход топлива
- Напряжение датчика O2
- Уровень напряжения батареи
- Время работы вашего двигателя
Это полезный инструмент для отслеживания данных о системах вашего автомобиля, которые не отображаются на вашей собственной приборной панели.
Однако имейте в виду, что сторонние приложения, работающие с этим устройством, не бесплатны.
Автомобильный диагностический сканер Panlong Bluetooth OBD-II (Android)
Если вы ищете недорогое решение, вы не ошибетесь, выбрав этот диагностический сканер OBD-II для Android от Panlong.
Это устройство работает с различными приложениями для Android, такими как Torque Pro, Torque Lite или OBD Car Doctor. Просто включите Bluetooth, и вы сможете просматривать данные различных датчиков и диагностировать коды ошибок, когда загорается индикатор Check Engine.
В отличие от большинства других устройств в этом ценовом диапазоне, это устройство также позволяет сбрасывать коды ошибок для незначительных проблем, таких как незакрепленная крышка топливного бака.
iSaddle Super Mini Bluetooth OBD2 Scan Tool
Еще одно недорогое решение для вашего Android-устройства — iSaddle Super Mini Bluetooth OBD2 Scan Tool.
Просто включите Bluetooth на своем телефоне и подключитесь к этому сканирующему прибору, чтобы считать информацию с вашего порта OBD-II. Устройство может читать все протоколы OBD-II. Вы можете использовать его с программным обеспечением Torque для Android или даже с программным обеспечением ScanMaster для ноутбука с поддержкой Bluetooth.
И если это важно для вас, у вас есть выбор из трех цветов адаптера порта на выбор!
BlueDriver Bluetooth Professional OBDII Scan Tool предназначен для тех, кому нужен более функциональный сканер портов OBD-II. Этот сканер поддерживает Bluetooth и работает с устройствами Android и iOS.
Это несколько дороже других беспроводных считывателей портов, представленных на рынке. Тем не менее, у него есть те функции, которые вы ожидаете от тех же самых дорогих инструментов сканирования, которые используют механики.
Устройство позволяет использовать мобильное приложение для считывания и удаления основных и расширенных кодов ошибок. Он также включает расширенные тесты, такие как подсчет пропусков зажигания, оперативные данные в виде цифровых показаний и графиков и даже отчеты о ремонте из часто обновляемой онлайн-базы данных.
Автомат PRO AUT-350
Чтение и стирание кодов ошибок полезно, но если вы действительно хотите иметь доступ к данным в реальном времени, вам подойдет адаптер Automatic PRO AUT-350 OBDII.
Это один из самых дорогих вариантов, но его функции просто потрясающие.
- Подключение 3G позволяет удаленно получать информацию о транспортном средстве, где бы вы ни находились.
- Получайте данные о транспортном средстве в режиме реального времени, даже если вы находитесь далеко от него.
- Обнаруживает сбои и отправляет экстренные службы на помощь.
- Интегрируется с Echo, Nest и IFTTT.
- Включено GPS-отслеживание, чтобы вы всегда знали, где находится ваш автомобиль.
Несмотря на то, что цена этого усовершенствованного сканера не уступает многим дорогим инструментам, используемым механиками, все эти впечатляющие функции оправдывают его стоимость.
Использование вашего порта OBD-II
Порт OBD-II используется в автомобилях уже много лет, но только недавно стал доступен для обычных водителей. Наличие этих устройств и приложений позволит вам гораздо лучше понять, что происходит с вашим автомобилем, задолго до того, как возникнут какие-либо серьезные проблемы.
Многие из этих сканеров портов оснащены функциями отслеживания местоположения. Если это то, что вас больше интересует, обязательно ознакомьтесь с некоторыми из лучших GPS-трекеров для вашего автомобиля. Даже если они не покажут вам диагностику вашего автомобиля, по крайней мере, они позаботятся о том, чтобы вы никогда не заблудились.
Надеемся, вам понравятся товары, которые мы рекомендуем и обсуждаем! У MUO есть аффилированные и спонсируемые партнерские отношения, поэтому мы получаем долю дохода от некоторых ваших покупок. Это не повлияет на цену, которую вы платите, и поможет нам предлагать лучшие рекомендации по продуктам.
В этом руководстве вы узнаете все о коммуникационном протоколе I 2 C, о том, зачем его использовать и как он реализован.
Протокол Inter-Integrated Circuit (I 2 C) – это протокол, предназначенный для обеспечения связи нескольких "периферийных" цифровых интегральных схем ("микросхем") с одной или несколькими "контроллерными" микросхемами. Как и последовательный периферийный интерфейс (SPI), он предназначен только для связи на короткие расстояния в пределах одного устройства. Подобно асинхронным последовательным интерфейсам (например, RS-232 или UART), для обмена информацией требуется всего два сигнальных провода.
Рекомендуемое чтение
Вещи, которые было бы полезно знать перед чтением этого руководства:
Последовательная связь
Последовательный периферийный интерфейс (SPI)
SPI обычно используется для подключения микроконтроллеров к периферийным устройствам, таким как датчики, сдвиговые регистры и SD-карты.
Двоичный
Двоичная система счисления в электронике и программировании. так что, должно быть, важно учиться. Но что такое двоичный код? Как это переводится в другие системы счисления, такие как десятичная?
Сдвиговые регистры
Логические уровни
Зачем использовать I2C?
Чтобы выяснить, почему кому-то может понадобиться общаться через I 2 C, вы должны сначала сравнить его с другими доступными вариантами, чтобы увидеть, чем они отличаются.
Что не так с последовательными портами UART?
Поскольку последовательные порты являются асинхронными (данные часов не передаются), использующие их устройства должны заранее согласовывать скорость передачи данных. Тактовые частоты двух устройств также должны быть близки к одной и той же частоте, и она останется такой — чрезмерная разница между тактовыми частотами на обоих концах приведет к искажению данных.
Асинхронные последовательные порты требуют накладных расходов на аппаратное обеспечение — UART на обоих концах относительно сложен, и его трудно точно реализовать в программном обеспечении, если это необходимо. По крайней мере, один стартовый и стоповый биты являются частью каждого кадра данных, а это означает, что для каждых 8 битов отправляемых данных требуется 10 бит времени передачи, что снижает скорость передачи данных.
Еще один основной недостаток асинхронных последовательных портов заключается в том, что они изначально подходят для связи между двумя и только двумя устройствами. Несмотря на то, что возможно подключить несколько устройств к одному последовательному порту, конфликты на шине (когда два устройства пытаются управлять одной и той же линией одновременно) всегда являются проблемой, и их следует решать с осторожностью, чтобы предотвратить повреждение рассматриваемых устройств, как правило, из-за внешнего оборудования.
Наконец, проблема заключается в скорости передачи данных. Хотя нет теоретических ограничений для асинхронной последовательной связи, большинство устройств UART поддерживают только определенный набор фиксированных скоростей передачи данных, и самая высокая из них обычно составляет около 230 400 бит в секунду.
Что не так с SPI?
![Блок-схема системы SPI». /><br /></p>
<p>Наиболее очевидным недостатком SPI является количество необходимых контактов. Для подключения одного контроллера [1] к одному периферийному устройству [1] с помощью шины SPI требуется четыре линии; для каждого дополнительного периферийного устройства требуется один дополнительный вывод ввода-вывода выбора микросхемы на контроллере. Быстрое распространение штыревых соединений делает их нежелательными в ситуациях, когда к одному контроллеру необходимо подключить множество устройств. Кроме того, большое количество подключений для каждого устройства может затруднить маршрутизацию сигналов в условиях жесткой компоновки печатной платы.</p>
<p>SPI допускает подключение только одного контроллера к шине, но поддерживает произвольное количество периферийных устройств (зависит только от возможностей привода устройств, подключенных к шине, и количества доступных контактов выбора микросхемы).</p>
<p>SPI подходит для высокоскоростных полнодуплексных соединений (одновременная отправка и получение данных), поддерживает тактовую частоту выше 10 МГц (и, следовательно, 10 миллионов бит в секунду) для некоторых устройств, а скорость хорошо масштабируется. Аппаратное обеспечение на обоих концах обычно представляет собой очень простой регистр сдвига, что позволяет легко реализовать его в программном обеспечении.</p>
<h3>Введите I 2 C - Лучшее из обоих миров!</h3>
<p><img class=](https://cdn.sparkfun.com/r/600-600/assets/learn_tutorials/8/2/SPI-Block_Diagram.jpg)
I 2 C требует всего два провода, как асинхронный последовательный порт, но эти два провода могут поддерживать до 1008 периферийных устройств. Кроме того, в отличие от SPI, I 2 C может поддерживать систему с несколькими контроллерами, что позволяет более чем одному контроллеру [1] связываться со всеми периферийными [1] устройствами на шине (хотя устройства контроллера не могут общаться друг с другом по шине). автобус и должны по очереди пользоваться автобусными линиями).
Скорость передачи данных находится между асинхронным последовательным портом и SPI; большинство устройств I 2 C могут обмениваться данными на частоте 100 кГц или 400 кГц. Есть некоторые накладные расходы с I 2 C; на каждые 8 бит отправляемых данных должен передаваться один дополнительный бит метаданных (бит «ACK/NACK», который мы обсудим позже).
Аппаратное обеспечение, необходимое для реализации I 2 C, более сложное, чем SPI, но менее сложное, чем асинхронное последовательное соединение. Это может быть довольно просто реализовано в программном обеспечении.
[1] Примечание. Возможно, вы знакомы с терминами «ведущее устройство» и «ведомое устройство», которые обозначают отношения между устройствами на шине I 2 C. Эти термины считаются устаревшими и теперь заменены терминами "контроллер" и "периферийное устройство" соответственно.
| Устаревшее имя | Имя замены |
|---|---|
| Мастер td> | Контроллер |
| Подчиненный | Периферийный |
Краткая история I2C
I 2 C был первоначально разработан в 1982 году компанией Philips для различных чипов Philips. Первоначальная спецификация допускала связь только на частоте 100 кГц и предусматривала только 7-битные адреса, ограничивая количество устройств на шине до 112 (существует несколько зарезервированных адресов, которые никогда не будут использоваться для действительных адресов I 2 C).В 1992 году была опубликована первая общедоступная спецификация, в которой был добавлен быстрый режим 400 кГц, а также расширенное 10-битное адресное пространство. В большинстве случаев (например, в устройстве ATMega328 на многих платах, совместимых с Arduino) поддержка устройства I 2 C заканчивается на этом этапе. Указаны три дополнительных режима:
- быстрый режим плюс, 1 МГц
- высокоскоростной режим на частоте 3,4 МГц
- сверхбыстрый режим, 5 МГц
В дополнение к «ванильному» I 2 C в 1995 году Intel представила вариант под названием «Шина управления системой» (SMBus). SMBus — это более строго контролируемый формат, предназначенный для обеспечения максимальной предсказуемости связи между поддерживающими ИС на материнских платах ПК. Наиболее существенная разница между SMBus заключается в том, что он ограничивает скорости от 10 кГц до 100 кГц, тогда как I 2 C может поддерживать устройства от 0 кГц до 5 МГц. SMBus включает режим тайм-аута часов, который делает низкоскоростные операции незаконными, хотя многие устройства SMBus все равно поддерживают его, чтобы максимизировать взаимодействие со встроенными системами I 2 C.
I2C на аппаратном уровне
Сигналы
Каждая шина I 2 C состоит из двух сигналов: SDA и SCL. SDA (Serial Data) — это сигнал данных, а SCL (Serial Clock) — это тактовый сигнал. Тактовый сигнал всегда генерируется текущим контроллером шины; некоторые периферийные устройства могут время от времени переводить часы на низкий уровень, чтобы задержать отправку контроллером дополнительных данных (или потребовать больше времени для подготовки данных, прежде чем контроллер попытается их синхронизировать). Это называется "растягиванием часов" и описано на странице протокола.
В отличие от подключений UART или SPI, драйверы шины I 2 C являются «открытыми стоками», что означает, что они могут тянуть соответствующую сигнальную линию с низким уровнем, но не могут повышать ее. Таким образом, не может быть конкуренции за шину, когда одно устройство пытается поднять линию на высокий уровень, а другое — на низкий, что устраняет возможность повреждения драйверов или чрезмерного рассеивания мощности в системе. На каждой сигнальной линии есть подтягивающий резистор, который восстанавливает высокий уровень сигнала, когда ни одно устройство не устанавливает низкий уровень сигнала.
Большинство устройств I 2 C, предлагаемых в каталоге SparkFun, обычно включают подтягивающие резисторы для выводов SCL и SDA. Если у вас есть много устройств I 2 C на одной шине, вам может потребоваться настроить эквивалентное значение для подтягивающих резисторов, отключив подтягивающие резисторы на нескольких устройствах. В зависимости от того, что подключено к шине и конструкции, на одну шину можно включить около 7 устройств I 2 C. Однако, если у вас возникли проблемы, вы можете отрезать две дорожки, соединяющие центральную контактную площадку, с помощью канцелярского ножа или удалить припой с трех контактных площадок с помощью паяльника, чтобы отсоединить резисторы на некоторых платах. Как видите, в конструкции платы GPS слева использовались дорожки для подключения перемычек для подтягивающих резисторов. В конструкции платы GPS справа для соединения перемычек подтягивающих резисторов использовался припой.
| |
| < i>Трассировка соединительных контактных колодок на SAM-M8Q | Пропайка соединительных контактных площадок на XA1110 |
Если ваша конструкция требует более длинных отрезков провода, вы можете использовать специальную микросхему для расширения сигнала, такую как PCA9615.
Читайте также: