
Как управлять шаговым двигателем без компьютера
Обновлено: 26.06.2024
Вы планируете свой первый 3D-принтер, фрезерный станок с ЧПУ или другое оборудование, требующее точного позиционирования. Оглядевшись вокруг, вы увидите множество людей, говорящих о шаговых двигателях. Но в чем именно они заключаются и особенно — как управлять шаговым двигателем?
Я собрал некоторые основные заблуждения и вопросы, которые люди задавали мне в течение долгого времени об управлении шаговыми двигателями. Начиная с общей логики управления шаговым двигателем и заканчивая некоторыми распространенными вопросами и проблемами.
Считайте это упрощенным руководством для начинающих. Я не вдаюсь в глубокую техническую и расчетную сторону вещей, которые могут быть очень сложными и зависеть от приложения. Все это вы сможете узнать позже. Ваша текущая миссия, скорее всего, состоит в том, чтобы запустить двигатель и понять основы работы с шаговыми двигателями.
Оглавление для быстрого ознакомления
Что такое шаговый двигатель?
В Интернете есть множество ресурсов, в которых подробно рассказывается о различных типах шаговых двигателей и принципах их работы. Посмотрите, например, эту статью о типах шаговых двигателей. Но это не важно в данный момент. Что вам нужно знать, так это то, что шаговые двигатели — это не обычные двигатели постоянного тока. Они не будут работать при подключении напрямую к источнику питания. У них обычно 4 провода, но есть и 5, 6 и 8 проводные моторы.
Вращение шагового двигателя управляется катушками возбуждения в правильном порядке и полярности. Двигатель перемещается точно на один небольшой заданный угол (называемый шагом) каждый раз, когда катушка(и) в двигателе возбуждается. Но двигатель не будет работать постоянно - он удерживает положение при включенном питании. Угол шага обычно составляет 1,8 градуса. Это означает, что вам нужно сделать 200 шагов, чтобы сделать полный поворот на 360 градусов (1,8 * 200). Посмотрите отличное видео на YouTube, в котором показано, как управлять шаговым двигателем, запитывая катушки в правильном порядке.
Несмотря на то, что они используются для точного позиционирования, у них нет механизмов обратной связи по положению, как у сервоприводов. Но при правильном использовании - в этом нет необходимости. Управление вращением и положением осуществляется путем правильного количества шагов.
Что нужно для запуска шагового двигателя?
Следующая глава представляет собой очень высокий обзор. Пожалуйста, ознакомьтесь с более подробной практической информацией о типах приводов и двигателей. Но представленные здесь основы довольно универсальны и широко используются в сообществе DIY.
Итак, что нам нужно, чтобы эти моторы заработали? Давайте разобьем его на компоненты и кратко объясним каждую часть. Обычно для привода шагового двигателя требуются следующие детали.
- Драйвер
- Микроконтроллер
- Электропитание

Подробный обзор компонентов, необходимых для привода шагового двигателя
Я не включил сюда блок питания для (микро)контроллера, так как он говорит сам за себя. Микроконтроллер, как в данном случае Arduino, получает питание от USB-кабеля или аккумулятора.
Драйвер
Как мы знаем, шаговый двигатель можно перемещать на один шаг, подавая электричество на катушки в правильном порядке (и полярности). Вы можете сделать это вручную с помощью некоторых переключателей — шаг за шагом, но это не имеет практического применения, кроме обучения. Здесь в игру вступает драйвер.
Драйвер выполняет тяжелую работу, и он скрывает всю сложность за простым интерфейсом. Он обеспечивает правильное возбуждение обмоток в зависимости от входных сигналов. Обычно у них есть только 2 входных контакта, которые принимают команды в виде цифрового высокого и низкого уровня. Один задает направление вращения, а другой для пошаговых команд.
Но это не так просто, как подключить ступени к логическому HIGH и ожидать, что привод будет постоянно вращать двигатель. Он все равно сделает только один шаг.
Шаги задаются в виде цифровых импульсов. После каждого шага (ВЫСОКИЙ) должен быть вход (НИЗКИЙ) на мгновение. Таким образом, привод может определить, когда дается команда нового шага. Если импульсы не подаются - привод и двигатель не будут выполнять шагов.
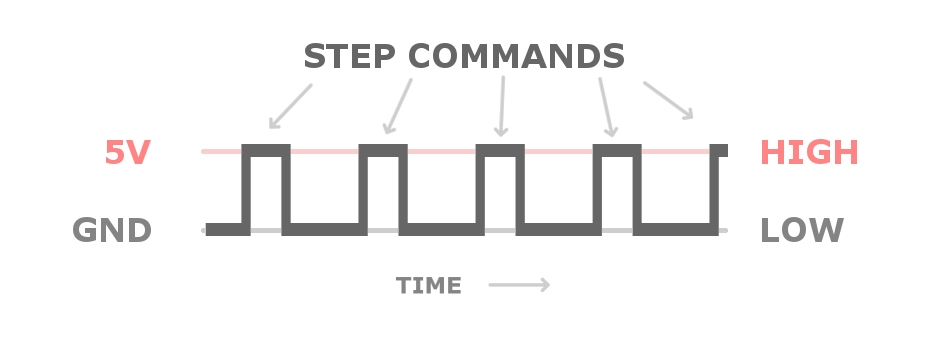
Пример цифрового сигнала LOW/HIGH
Входной контакт направления может быть НИЗКИМ или ВЫСОКИМ все время, пока выполняются шаги, в зависимости от необходимого направления. Направление не нуждается в импульсах.
Примечание. Некоторые небольшие униполярные двигатели приводятся в действие с помощью массивов транзисторов или микросхем, таких как uln2003 и ln2004. Управляющих проводов может быть 4 вместо 2-х от микроконтроллера.В этой конфигурации микроконтроллер напрямую указывает, на какие провода (катушки) подавать питание, поворачивая правильные на каждом шаге «вручную». Посмотрите пример схемы на странице Arduino.
Микроконтроллер
Можно заставить двигатели двигаться, коснувшись шагового штифта на приводе вручную проводом HIGH. Но это было бы не очень практично, кроме тестирования. Вот почему микроконтроллер вступает в игру. Микроконтроллеры могут выдавать сотни или даже тысячи импульсов в секунду, поэтому двигатель можно вращать очень быстро и точно.
Контроллер сам не знает, как вы хотите двигать свой мотор, чтобы он был полезен. На контроллер должно быть установлено какое-то программное обеспечение (прошивка). Если вы строите фрезерный станок с ЧПУ или 3D-принтер, вы можете использовать программное обеспечение, уже написанное другими. Например:
При создании чего-то нестандартного вам нужно покопаться в программировании. Для тестирования можно использовать очень простую программу, которая просто переключает двигатель в одном направлении. Вот пример кода для Arduino.
Для более простых приложений этого, вероятно, достаточно, но для всего, что обрабатывает более тяжелые нагрузки и более сложные операции, вам следует использовать некоторую библиотеку. Для Arduino вы можете использовать библиотеку AccelStepper. Посмотрите мой простой пример кода с драйвером TB6600. Там вы можете увидеть такие функции, как ускорение и установка максимальной скорости.
Электропитание
Для большинства приводов и двигателей требуется внешний источник питания. Некоторые небольшие моторы из комплекта Arduino могут работать от питания USB/Arduino как «28BYJ-48». Но все, что больше, требует большей мощности и напряжения. Для тестирования, скорее всего, можно использовать обычный блок питания компьютера или ноутбука.
Что нужно знать о типах двигателей и приводов
В предыдущем разделе я в общих чертах описал принцип работы шаговых двигателей. Но это сложнее, чем просто соединить вещи. Существуют различные типы приводов, двигателей и схем подключения.
Биполярные и униполярные моторы
В целом существует два типа шаговых двигателей: биполярные и униполярные. Разница заключается в том, как катушки внутри двигателя подключены и как они могут быть запитаны, чтобы получить правильные магнитные полюса для каждого шага. Все сводится к простому вопросу. Сколько проводов у шагового двигателя? По проводам, выходящим из мотора, мы можем определить, что это за мотор и какой привод нужен для его работы.
Двигатель с 4 проводами может управляться только биполярным приводом. 5-проводной двигатель может приводиться в действие только униполярным приводом, так как центральные отводы соединены внутри. Двигатели с 6 и 8 проводами можно использовать с обоими типами приводов, поскольку вы сами решаете, как их подключать снаружи.
Разница заключается в том, как питаются катушки внутри двигателей. В биполярном двигателе ток (полярность) необходимо менять местами в проводах для каждого шага. Униполярные двигатели обеспечивают переполюсовку через центральные отводы в катушках, но одновременно подают питание только на половину катушки. У Adafruit есть хорошая статья об катушках и проводке униполярных и биполярных двигателей. Это определенно плюс, если вы ознакомитесь с тем, чем они отличаются.
Типы драйверов
Помимо однополярных и биполярных приводов, существуют также разные способы управления током и напряжением в обмотках двигателя. Основные типы:
- приводы постоянного напряжения, также называемые приводами L/R
- приводы постоянного тока, также называемые инверторными приводами
Я не буду вдаваться в подробности об униполярных приводах или приводах постоянного напряжения, так как, скорее всего, вы получите привод постоянного тока с биполярным двигателем. Чопперные приводы сегодня наиболее популярны из-за ограничений по крутящему моменту и скорости шаговых приводов L/R.
Преимущества привода измельчителя
При использовании инверторного привода номинальное напряжение двигателя практически не имеет значения. По крайней мере, для пользователя-любителя и энтузиаста Arduino. Так что не пугайтесь шагового двигателя из-за очень низкого номинального напряжения. Важным показателем является номинальный ток.
Привод прерывателя может управлять шаговым двигателем с гораздо более высоким напряжением, чем номинальное напряжение двигателя. Более высокое напряжение позволяет току проходить через шаговый двигатель быстрее, что дает возможность вращать его быстрее с большим крутящим моментом. Привод поддерживает ток в двигателе ниже фиксированного значения, что предотвращает перегорание двигателя. Кроме того, более высокое напряжение означает меньшее выделение тепла.
Фиксированный ток обычно устанавливается потенциометром на плате привода. Это позволяет изменять максимальный ток в зависимости от необходимого крутящего момента и номинального тока в зависимости от характеристик двигателя.

Примеры токоограничивающих потенциометров на приводах с шаговым двигателем (прерыватель)
Как подключить шаговый двигатель к драйверу
Есть 2 конфигурации. В настоящее время я более подробно объясняю биполярное расстройство, но когда-нибудь добавлю и однополярное. В любом случае биполярная конфигурация в наши дни более популярна.
Подключение шагового двигателя с 4 или 6 отведениями в биполярной конфигурации
4-проводной шаговый двигатель — самая простая и популярная конфигурация в наши дни. Вам нужно только выяснить, какие лиды образуют пару. Проще всего использовать мультиметр и измерить сопротивление между проводами, которые идут от шагового двигателя. 4-проводной двигатель самый простой. Если нет чтения, значит, он не подключен. Если вы читаете - это пара. Вы даже можете сделать это без мультиметра, просто вращая двигатель, касаясь проводов. Любая комбинация, которая затрудняет движение двигателя, — это пара.
В 6-проводном двигателе необходимо найти внешние выводы и пропустить центральные общие выводы. Центральные выводы будут иметь ровно 1/2 сопротивления, чем внешние выводы. Просто начните тестировать пары отведений и выясните, какие отведения составляют пары с наибольшим сопротивлением.
Эти 2 пары теперь можно подключить к накопителю. Обычно эти пары называются A и B. В моем примере они подключены к биполярному приводу A3967, где есть четкая маркировка, какие выводы куда идут. Иногда разъемы на накопителе маркируются как А1, А2 и В1, В2. Иногда они маркируются А-, А+ и В-, В+. Неважно, каким способом вы соединяете провода внутри одной пары. Он только изменяет вращение двигателя.

Схема подключения шаговых двигателей с 4 и 6 отведениями и биполярным приводом A3967
Подключение шагового двигателя с 5 или 6 отведениями в униполярной конфигурации
5-проводной шаговый двигатель может быть подключен только как униполярный. 6-проводной двигатель можно использовать в обоих случаях. Чтобы использовать 6-проводной двигатель в униполярной конфигурации, вам нужно только соединить центральные отводы вместе. И этот подключенный центральный ответвитель будет пятым проводом, и вы можете использовать его как 5-проводной шаговый двигатель.
Подключение униполярного шагового двигателя к приводу немного сложнее. Вы должны выяснить правильный порядок проводов. В противном случае двигатель будет двигаться только вперед и назад. Посмотрите это видео на YouTube, которое очень легко понять и объясняет процесс нахождения правильного порядка.
Распространенные вопросы, проблемы и заблуждения
Я перечислил некоторые распространенные вопросы, которые люди задавали мне и форумам. Дайте мне знать, если я пропустил что-то важное в списке.
Как запустить шаговый двигатель без микроконтроллера?
Это вполне возможно, поскольку приводу все равно, откуда он получает шаговые импульсы. Вам нужен только какой-то источник для импульсов и направления.
Самый простой вариант — использовать микросхему таймера NE555. Посмотрите это видео. Определенно есть несколько приложений, где генератор частоты и некоторые кнопки и ручки являются жизнеспособным решением. Может быть слайдер таймлапс фотографии? Но, может быть, было бы проще использовать обычный двигатель постоянного тока?
Как повернуть шаговый двигатель на 90 градусов (или любые другие градусы)
Поскольку шаговый двигатель перемещается на один шаг, вам нужно знать, сколько градусов составляет один шаг. Скорее всего, это 1,8 градуса на шаг. Это означает, что полный оборот будет достигнут, когда двигателю будет дано указание сделать 200 шагов (1,8 градуса * 200 шагов = 360 градусов).
Итак, реальный вопрос будет следующим. Сколько шагов мне нужно, чтобы повернуть двигатель на 90 градусов?
В примере с углом поворота 90 градусов и мотором с углом поворота 1,8 градуса мы получим 50 шагов, следуя простой формуле.
90 градусов / 1,8 градуса => 50 шагов
Вот еще один пример перемещения на 45 градусов:
45 / 1,8 => 25 шагов
Как мы можем контролировать скорость шагового двигателя?
Скорость определяется количеством пошаговых команд, отдаваемых за определенный период времени. Если вы отправляете 400 шаговых команд для привода за одну секунду, а двигатель составляет 1,8 градуса на шаг. Вы в конечном итоге поворачиваете двигатель ровно на 2 полных оборота. Это делает скорость 2 оборота в секунду (2 об/мин).
Фактическое одношаговое движение само по себе не может быть изменено, так как оно происходит, когда быстрый мотор способен двигаться. Но можно использовать микрошаг, чтобы немного сгладить его.
Могут ли шаговые двигатели работать непрерывно?
Да. Шаговые двигатели предназначены для непрерывного вращения как вперед, так и назад.
Что такое удерживающий момент (ток) и зачем он нужен?
Обмотки шагового двигателя находятся под напряжением, даже если сам ротор неподвижен. Это необходимо, чтобы удерживать груз на месте, пока он стоит на месте.
Удерживающий момент — это величина крутящего момента, необходимая для перемещения двигателя на один полный шаг, когда катушки находятся под напряжением, а ротор неподвижен.Ток удержания — это обычно ток, который может выдержать двигатель и который выдает драйвер, пока он стоит на месте.
Но зачем нам сила, когда мы стоим на месте?
Вы можете подумать, что когда двигатель не вращается, нет необходимости питать катушки? Это может быть так, но только если оно не подвижно внешними силами. Если другие компоненты могут перемещаться, может потребоваться удерживать двигатель неподвижно, не отключая питание от катушек. В противном случае двигатель может потерять положение, когда он не используется, из-за некоторых сил, действующих на другие оси станка.
Какой драйвер мне нужен для запуска двигателя NEMA 17 (или NEMA 24 и т. д.)?
Nema 17 не является стандартом для электрических характеристик шагового двигателя. Это стандартная лицевая панель и монтажные отверстия, облегчающие замену двигателей. Скорее всего, вам нужно проверить по спецификации, какой номинальный ток для этого двигателя и является ли он однополярным или двухполярным. Выберите драйвер на основе этого.
Примечание. Привод всегда может быть мощнее двигателя, но вы должны ограничивать ток со стороны привода. Также можно использовать инверторные приводы с меньшим номинальным током, но тогда ваш двигатель будет работать с недостаточной мощностью.
Однако можно определенно сделать предположение о размере двигателя, что NEMA 17 может использовать ток 1–2 А, а NEMA 23 может использовать ток около 2–5 А.
Заключительные слова
Цель этой статьи заключалась в том, чтобы сделать общий обзор того, как управлять шаговым двигателем. Надеюсь, я справился, и теперь вы лучше понимаете эту тему и можете начать экспериментировать.
Теперь начинается настоящее веселье и обучение.
Есть гораздо больше, чем те основные понятия, которые я представил. Будут проблемы с вибрацией, крутящим моментом, охлаждением моторов, выбором железа, пропущенными шагами, расчетом шагов и настройкой софта. Проекты с шаговыми двигателями подвержены проблемам из-за всех зависимостей в цепочке. Начиная с оборудования или питания, заканчивая плохой конфигурацией или просто неправильной программой. Здесь очень пригодятся базовые навыки отладки, а также наличие дополнительных компонентов для переключения в случае сбоя оборудования.
Отвечал ли я на все основные вопросы? Или я пропустил какую-то важную концепцию, которая заставила вас задуматься? Дайте мне знать об этом в комментариях. Буду признателен за информацию, чтобы улучшить эту статью.
Шаговые двигатели сильно отличаются от обычных электродвигателей постоянного тока тем, что они вращаются не непрерывно, а, как следует из названия, движутся дискретными шагами. Иногда эти шаги настолько малы, что общее вращение шагового двигателя неотличимо от обычного. Шаговые двигатели имеют ряд преимуществ перед обычными двигателями в системах автоматизации и управления. Как только они переместились в новое положение, они могут удерживать его против любого приложенного крутящего момента от нагрузки (в пределах своей нагрузки). Они также предлагают очень точный контроль над положением, позволяя своей системе управления указывать, на сколько шагов нужно двигаться в указанном направлении и с какой скоростью. Либо сами по себе, либо в сочетании с системой привода с ремнем и шкивом, это делает шаговые двигатели очень мощным и гибким устройством в репертуаре инженеров по автоматизации.
В этом руководстве мы будем использовать плату USB-адаптера StepperBee для вращения шагового двигателя на заданное количество шагов в заданном направлении с заданной скоростью с помощью ПК.
Шаговый двигатель, используемый в этом примере, наиболее часто используется в большинстве приложений со средним крутящим моментом. Это 12-вольтовый, 4-фазный, униполярный шаговый двигатель с шагом 1,8 градуса (т. е. он делает один полный оборот за 200 шагов).
StepperBee может управлять 2 независимыми шаговыми двигателями, и для наших целей мы будем использовать управляющие соединения для двигателя 1. Они подключены, как показано ниже
Здесь мы используем стандартный блок питания 12 В постоянного тока с номинальным током 500 мА, которого более чем достаточно для наших целей.
Требуется последнее соединение, и это просто подключение StepperBee к свободному USB-разъему на ПК с помощью стандартного USB-кабеля. Как только вы подключите этот кабель, ПК автоматически настроит драйверы для использования с ним. Эти драйверы уже являются частью Windows (WinXP или более поздней версии), поэтому нет необходимости в какой-либо отдельной установке сторонних драйверов
.
Программное обеспечение
Подключив шаговый двигатель, мы теперь готовы управлять им с ПК. Для этого вам необходимо установить программное обеспечение AutoStep, которое поставляется вместе с StepperBee. Вставьте установочный диск и следуйте знакомой последовательности установки.
Запустите AutoStep, и вы увидите экран, показанный ниже.

нажмите на изображение для увеличения разрешения в новом окне
Несмотря на то, что AutoStep имеет средства для широкого спектра функций управления, мы просто хотим, чтобы шаговый двигатель перемещался на определенное количество шагов в указанном направлении с заданной скоростью. Для этого мы воспользуемся разделом «Ручное управление» в левом верхнем углу экрана.
Введите 200 в поле количества шагов. Введите 20 в поле интервала.
Нажмите кнопку «Выполнить».
Если все в порядке, вы должны увидеть, как шаговый двигатель совершает один полный оборот по часовой стрелке примерно за полсекунды

Введение: управление скоростью и направлением шагового двигателя без микроконтроллера



В одном из моих предыдущих руководств я показал вам, как управлять скоростью шагового двигателя с помощью таймера 555. Этот проект является обновлением предыдущего, и вы узнаете, как управлять направлением вращения двигателя с помощью еще одной микросхемы таймера 555. Итак, без лишних слов, приступим!
Шаг 1. Получите все!
Вот что вам понадобится:
- Драйвер шагового двигателя A4988
- 2 микросхемы таймера 555
- Прототип макетной платы
- 12-вольтовый блок питания.
- 5-вольтовый блок питания (наоборот, вы также можете использовать регулятор напряжения с 5-вольтовым выходом, например LC805CV).
- Резистор 1 кОм.
- 2 резистора по 10 кОм
- 3 светодиода (необязательно)
- 3 резистора 330 Ом (опционально для светодиодов)
- Конденсатор (от 0,3 мкФ до 10 мкФ, попробуйте поэкспериментировать с различными конденсаторами в этом диапазоне. Конденсаторы выше этого диапазона заставят шаговый двигатель двигаться очень медленно, а конденсаторы ниже диапазона не позволят двигателю двигаться вообще. Убедитесь, конденсаторы рассчитаны на напряжение выше 10 вольт.)
- Потенциометр на 100 кОм
- 2 кнопки (нормально открытые)
- Множество перемычек типа "папа-папа".
Шаг 2. Начните с подключения драйвера двигателя A4988 к макетной плате
После подключения драйвера двигателя подключите контакт VDD (или VCC) к +5 вольт, GND к, очевидно, GND и VMOT к 12 вольт. Не забудьте соединить выводы SLP и RST вместе! Для этого я использовал маленькую перемычку.
Шаг 3. Получите помощь по электрической схеме
Обратите внимание: для IC(1) контакт 6 должен быть подключен к контакту 2 микросхемы.
Пожалуйста, перейдите к следующему шагу, прежде чем начинать делать схему.
Шаг 4. Подключите и протестируйте регулятор скорости
Настройте и подключите только регулятор скорости. Подключите контакт DIR драйвера двигателя к GND или +5 вольт во время тестирования. Включите вашу схему и проверьте, правильно ли она работает. Если есть какие-либо проблемы, устранение неполадок будет проще, чем после подключения контроллера направления.
Шаг 5. Подключите и протестируйте контроллер направления
Шаг 6: ГОТОВО!
Надеюсь, вам понравилось делать этот проект. Я хотел бы увидеть, что вы построили. Предложения приветствуются!
Поделиться первым
Вы сделали этот проект? Поделитесь с нами!
Рекомендации




Конкурс "Сделай это ярким"
Конкурс игрушек и игр
Конкурс авторов-первокурсников
36 комментариев

Привет,
Я создаю этот проект для моторизации ползунка видеокамеры, и у меня есть некоторые сомнения:
в проекте только для скорости есть соединение между контактами 2 и 6 IC 555, но в проекте скорость + направление с 2 555 IC это соединение отсутствует на схеме (см. прилагаемое фото) схема правильная или эти контакты от IC 1 также должны быть подключены в проекте скорость + направление?
Также я собираюсь заменить стандартные микропереключатели на пару концевых выключателей с рычажными рычагами, чтобы ползунок мог работать в цикле из одного направления в другое. это должно работать без каких-либо изменений в схеме, верно?
заранее спасибо за помощь в этом вопросе :)


Ответить 7 месяцев назад
На самом деле в этом проекте также необходимо подключить контакты 2 и 6, которые необходимы для генерации импульса на выходе микросхемы таймера 555. Я добавил примечание после изображения, но теперь, похоже, мне нужно обновить изображение.
Говоря о концевых выключателях, да, вы можете использовать их, чтобы, когда двигатель натыкается на переключатель, его направление было изменилось, и двигатель начинает двигаться назад, чтобы наткнуться на другой переключатель и снова изменить свое направление.
Всего наилучшего для сборки проекта!
Ответить 7 месяцев назад
KushagraK7 большое спасибо за ответ и за то, что поделились своими проектами, вы не представляете, насколько этот проект полезен для меня,
всего хорошего
Ответить 7 месяцев назад
Приятно знать. Рад помочь.
Ответить 6 месяцев назад
Привет, KushagraK7, я сделал проект, к сожалению, мне не удалось заставить его работать должным образом. Интересно, можете ли вы мне помочь :) только один из переключателей работает и меняет направление, но когда он меняет направление, двигатель работает хаотично и иногда возвращается в противоположное направление. Я проверил все подключения и все проверяет. в вашем первом проекте без направления у вас есть контакт DIR, подключенный к земле, в этом проекте контакт DIR подключен только к контакту 3 второго 555 IC, должен ли он также подключаться к земле, а также к контакту 3? также я использую драйвер шагового двигателя A4988. Должны ли SLP и RST быть привязаны к + 5 В, как кто-то упоминал в комментариях? У меня только они связаны друг с другом, как в вашей схеме. если нет что это может быть? есть идеи, почему не работают оба переключателя? Вы можете помочь? Спасибо

Соединительные контакты 2 и 6 отсутствуют на схеме подключения, без них он не может работать. 8825 работает нормально с конденсатором 100 мкФ на питании двигателя и заземлением рядом с контактами. SLP и RST должны быть подключены к +5В.
Ответить 2 года назад
Поскольку имеется внутренний подтягивающий резистор, подключенный между +5 В и контактом RST модуля драйвера двигателя A4988, подключения контакта SLP к контакту RST достаточно, чтобы драйвер работал. Но в случае DRV8825 контакты SLP и RST должны быть подключены к +5 В.
Ответить 2 года назад
Я имел в виду подключение контактов 2 и 6 555(1), без этого подключения 555(1) не будет генерировать импульсы.
Ответить 7 месяцев назад
Ах, извините. Я сделал соединения в TinkerCAD, и кажется, что провод спрятан за микросхемой.

Вопрос 12 месяцев назад о введении
Похоже, это похоже на то, что я пытаюсь построить.
Я хочу управлять, скажем, ящиком. Используя очень простую схему.
Вы нажимаете кнопку, ящик открывается до тех пор, пока не коснется концевого выключателя. Нажмите еще раз, и ящик закроется и остановится, когда дойдет до другого концевого выключателя.
Я все перерыл, пытаясь найти схему для этого. Но, будучи новичком, я не могу построить необходимую схему.
Для ящика потребуется nema 23 для требуемой силы. Я буду крутить ходовой винт. Скорость должна быть около 75 мм/сек. Источник питания 12 В постоянного тока.
Я считаю, что это довольно распространенное желание для многих из нас. Приложений много. Но, как я уже сказал, я еще не видел инструкции. По крайней мере тот, который не использует микроконтроллер.
Любая помощь будет принята с благодарностью.
Большое спасибо
Кевин
Ответить 11 месяцев назад
Ответить 11 месяцев назад
Фантастика. Именно по мере необходимости. Большое спасибо за усилия.
Я соберу один, установлю и опубликую примерно через месяц.
Ура
Кевин
Ответить 11 месяцев назад
Я рад, что вам понравилось. Всего наилучшего проекту!
Ответить 12 месяцев назад
Это кажется интересным. Пожалуйста, дайте мне немного времени, чтобы разобраться со схемой, и я скоро дам вам знать.
Ответить 12 месяцев назад
Отлично. Мой опыт работы в области механических исследований и разработок. Могу помочь с заявкой, если кому надо.
Просто FWI. Это будет использоваться для выдвижения и втягивания раковины в носовой части моей парусной лодки. Он убирается в сторону, чтобы получить доступ к туалету.
Я думаю, что у него есть много приложений типа выдвижных ящиков для инвалидов. Вроде почему я делаю это сам. Я живу на борту и у меня артрит. Просто манипулировать стоковой системой болезненно. Так что немного усилий, чтобы построить его, сэкономит много боли в будущем :)

Вопрос 1 год назад
Во время манипулирования потенциометром я вижу определенное место с потенциометром, где мотор быстро трясется взад-вперед, пока я не увеличу или не уменьшу потенциометр. Я пробовал банки на 50, 100 и 220 тысяч с разными крышками: 0,22 мкФ, 1 мкФ и 10 мкФ. Проблема сохраняется в любой конфигурации. Также иногда при первом включении системы направление вращения случайное. Есть идеи, как исправить эти проблемы?
Ответ 1 год назад
Пожалуйста, проверьте следующее:
Появляется ли это пятно при ускорении или замедлении двигателя?
Какой тип двигателя используется?
Попробуйте сделать следующее:
Проверьте правильно ли подключены электропроводки двигателя. Возможно, провода шагового двигателя подключены в неправильной последовательности, попробуйте изменить последовательность проводов, соединяющих двигатель и драйвер.
Попробуйте использовать другой шаговый двигатель и/или драйвер двигателя.
Ответить 1 год назад
Привет, OP, спасибо за ответ,
Я просто хочу сказать, что мне нравится эта схема, она проста и работает именно так, как нужно.
Это происходит в любом направлении, и это всегда одно и то же место на горшке. Это буквально вопрос 2-3 градусов или около того. Это происходит и с другим контроллером.Замена двигателей невозможна. Боюсь, у меня только один. Он поставляется с собственным кабелем, поэтому перепутать обмотки невозможно.
Что касается случайности направления при включении питания, я могу удерживать один из переключателей, чтобы гарантировать направление, в качестве альтернативы вместо кнопок можно использовать 3-контактный тумблер. Тем не менее, было бы неплохо иметь направление начала по умолчанию.
Двигатель представляет собой шаговый двигатель NEMA17 34 мм. Угол шага: 1,8° (200 шагов/об), удерживающий момент 0,3 нм, 1,33 А/фаза.
- Угол шага (градусы): 1,8
- Размер двигателя (мм): 42 x 34 (высота)
- Номинальный ток (А): 1,33
- Сопротивление фазы (Ом): 2,1
- Фазовая индуктивность (мГн): 2,5
- Удерживающий момент (Н.см): 30
- Момент фиксации (Н·см): 1,6
- Инерция ротора (г.см2): 35
- Отводящий провод (нет): 4
- Длина провода: 30 см.
- Вес двигателя (г): 220

Вопрос 2 года назад
С нетерпением жду создания этого, и я заметил, что контроллер «только скорость» Instructable сказал, что униполярные или биполярные шаговые двигатели в порядке, так ли это в случае с этим? Если да, то у меня загружено 28BYJ-28, и я просто не подключаю красный провод или мне нужно демонтировать и перерезать дорожку, как это обычно делают в проектах Ardunio? Большое спасибо
Ответить 2 года назад
Я только что видел, что они стоят около 10 фунтов стерлингов каждый, а мне нужно четыре, поэтому я рассмотрю другое решение.
С помощью Raspberry Pi Pico можно управлять шаговым двигателем. Вот как…
В этом блоге рассказывается, как можно использовать шаговый двигатель с Raspberry Pi Pico

15 апреля 2021 г. By Team YoungWonks *
Как можно управлять шаговым двигателем с помощью Raspberry Pi Pico? В этом блоге мы рассмотрим это. Но прежде чем мы углубимся в это, давайте посмотрим, что такое шаговый двигатель.
Что такое шаговый двигатель?
Далее давайте кратко рассмотрим Raspberry Pi Pico.
Что такое Raspberry Pi Pico?
Raspberry Pi — серия небольших одноплатных компьютеров, разработанных в Великобритании организацией Raspberry Pi Foundation совместно с Broadcom. Доски были сделаны с учетом популяризации обучения детей основам информатики. Последним предложением Raspberry Pi является Raspberry Pi Pico, новая гибкая плата IoT. По сути, это плата микроконтроллера, построенная на кремнии и разработанная Raspberry Pi Foundation.
При цене всего 4 доллара Raspberry Pi Pico меньше, чем средний Pi, и указывает на то, что фонд сейчас планирует расшириться до микроконтроллеров и нестандартного кремния.
Распиновка Raspberry Pi Pico
Для правильного использования рекомендуется хорошо ознакомиться с распиновкой Raspberry Pi Pico. Диаграмма ниже объясняет это.
Проекты Raspberry Pi Pico
В качестве микроконтроллера Raspberry Pi Pico можно использовать во многих проектах, будь то Интернет вещей (IoT), проекты Adafruit Neopixel, регистрация данных, робототехника малого и среднего масштаба, проекты, требующие взаимодействия с камерами, аналоговые датчики (с использованием датчики окружающей среды) и многое другое.
Использование шагового двигателя с Raspberry Pi Pico
Теперь мы посмотрим, как управлять шаговым двигателем с помощью Raspberry Pi Pico.
Для этого нам понадобится Raspberry Pi Pico на макетной плате, шаговый двигатель, контроллер шагового двигателя и шесть проводов.
Взгляните на эту принципиальную схему, чтобы построить электрическую цепь.
Взгляните на электрическую цепь, чтобы проверить ее.
Сначала мы подключаем шаговый двигатель к контроллеру двигателя.
Затем мы подключаем различные контакты IN1, IN2, IN3 и IN4 к четырем GPIOS, настроенным как выходы.
Затем мы обеспечиваем подключение питания и заземления.
Теперь, когда мы готовы с соединениями, пришло время взглянуть на код. Начните с импорта модуля выводов из машинной библиотеки.
Мы также импортируем utime, чтобы добавить некоторые задержки.
Далее мы создаем список контактов, настроенных как выходы. Шаговый двигатель по существу работает, предоставляя последовательность значений этим четырем контактам.
Затем мы создаем список последовательностей, которые будут переданы шаговому двигателю. Как видите, мы создаем последовательности, в которых значение 1 перемещается по разным позициям в списке.
Теперь в бесконечном цикле мы проходим последовательность и применяем каждое значение последовательности к каждому из контактов.Мы также добавляем немного задержки, чтобы мы могли заметить поворот.
Теперь мы видим, что шаговый двигатель работает нормально.
Вы можете посмотреть видео ниже, чтобы узнать, как можно использовать шаговый двигатель с Raspberry Pi Pico:
*Соавторы: Автор Видья Прабху; Главный снимок: Леонел Круз.
Этот блог представляет вам YoungWonks. Ведущая программа программирования для детей и подростков.
YoungWonks предлагает индивидуальные онлайн-занятия под руководством инструктора и очные занятия с соотношением учеников и преподавателей 4:1.Подпишитесь на бесплатную пробную версию класс, заполнив форму ниже:
Читайте также: